I am pursuing a Master’s in Mechanical Engineering and Data Science at the University of Washington, Seattle (August 2023 – Present). I also hold another Master’s degree in Electrical and Computer Engineering from the University of Arizona (August 2021 – August 2023), where I conducted research under the guidance of Dr. Salim Hariri and Dr. Pratik Satam on Secure Navigation and Perception of Autonomous Vehicles.
My research is centered in the field of robotics, where I aim to enhance robot navigation and perception using an anomaly behavior modeling approach. I employ machine learning and mathematical modeling techniques to characterize the normal behavior of robotic systems and identify deviations from this norm. These deviations allow me to detect anomalies and cyber-attacks against the system. My work bridges theoretical development and real-world applications, addressing areas like self-driving cars, quadruped robots, and quadcopters.
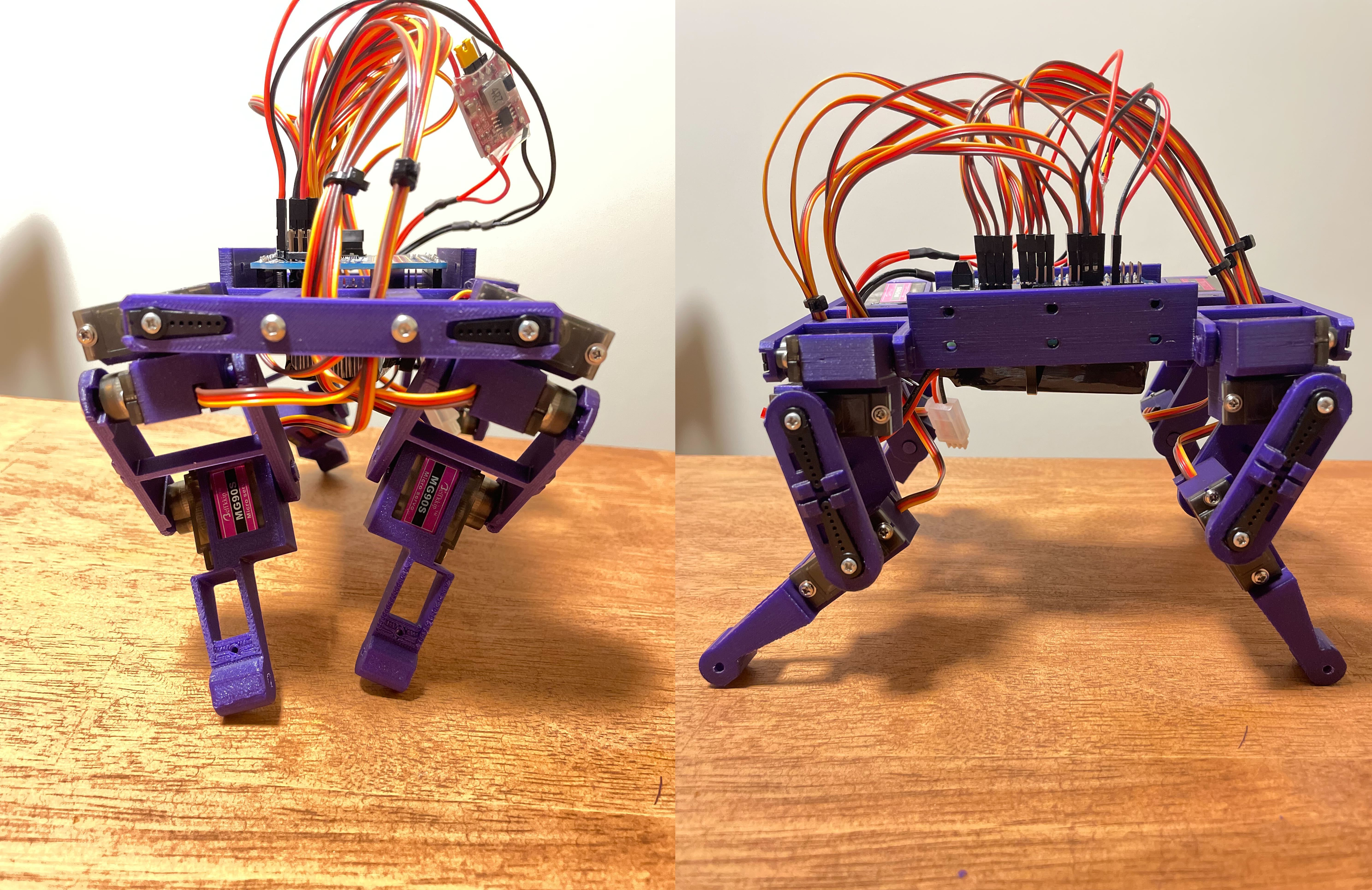
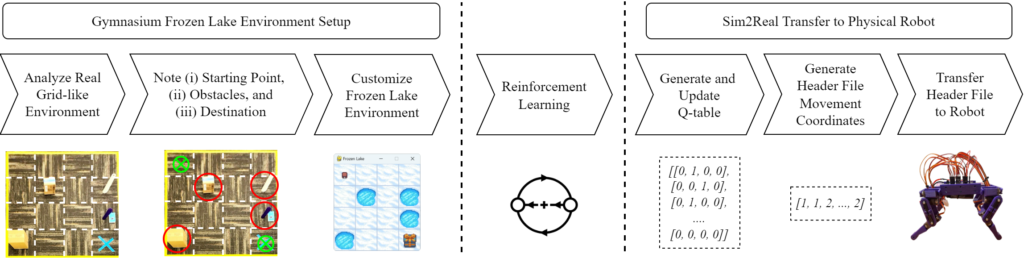
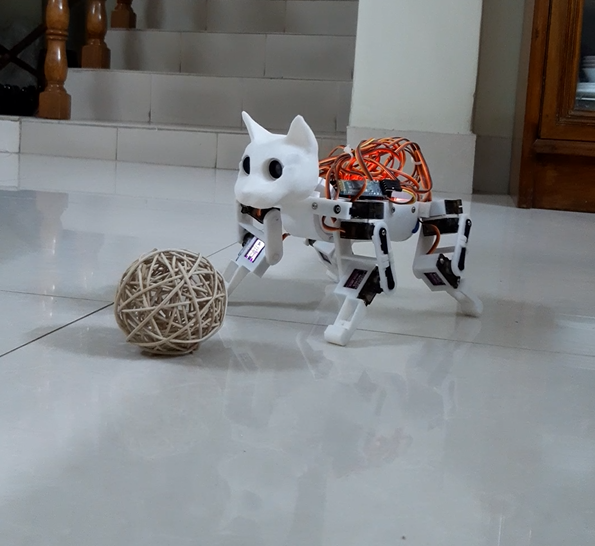
In addition, I explore alternative ways of autonomous navigation for mobile robots to minimize reliance on localization sensors. In my most recent project, I utilized reinforcement learning to train a quadruped robot to avoid obstacles and navigate indoors without using sensors. Check this video on YouTube!
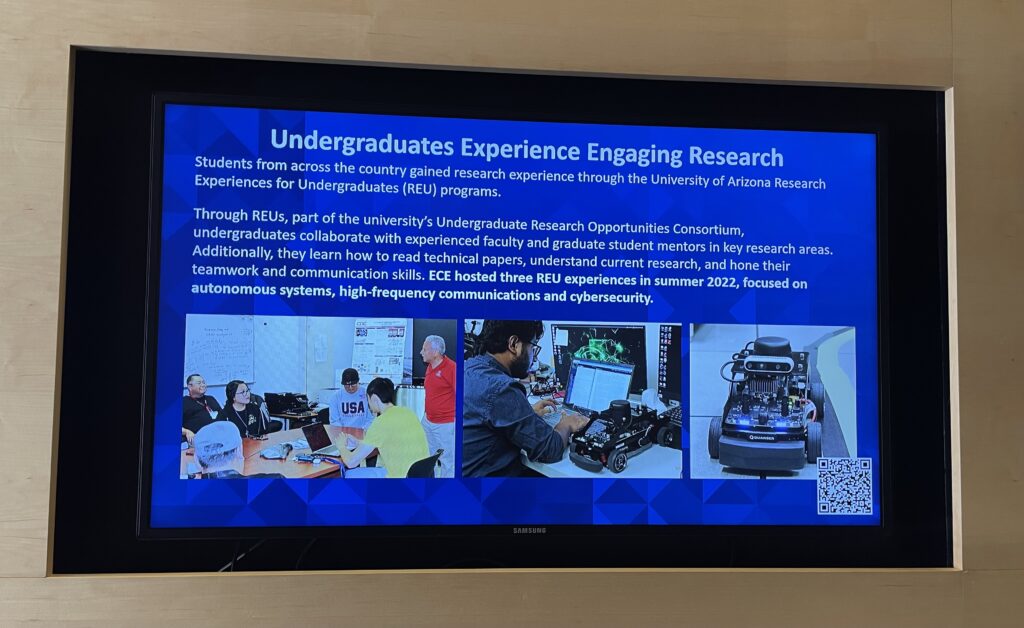
I am passionate about teaching and continue to refine my skills as an educator through my roles as a Lead Instructor at BlueStamp Engineering, multiple Graduate Teaching Assistantships, and as a Mentor for the Research Experience for Undergraduates (REU) and Partnership for Proactive Cybersecurity Training (PACT) programs.
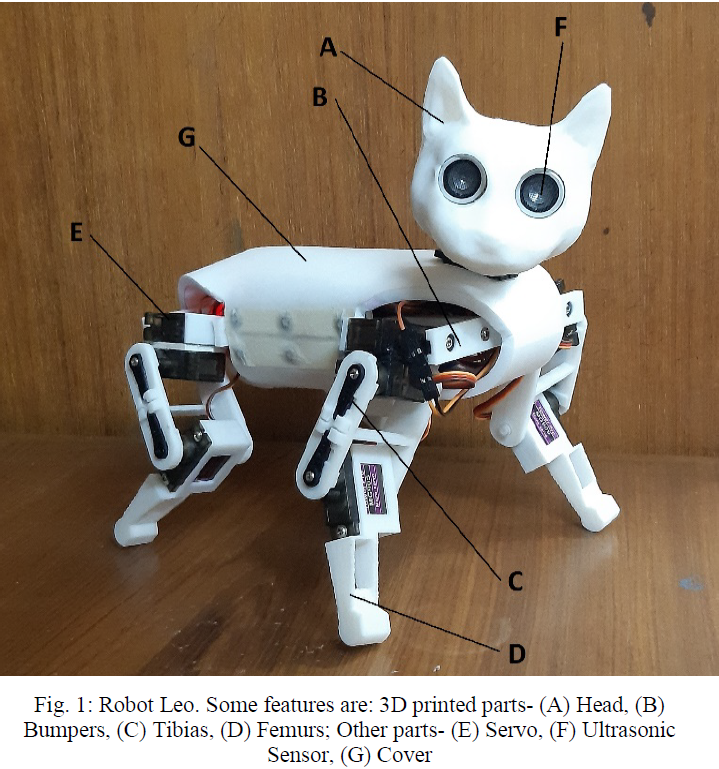
I have been extremely motivated by companion robots like Aibo and Pleo since my early childhood, which inspired me to develop a companion robot for myself, Leo!
My technical skill set includes Python, C++, microcontrollers (Arduino and compatible platforms), microprocessors (Raspberry Pi, Jetson), 3D modeling, precision soldering, and electro-mechanical hardware/ software integration.
This website contains my academic projects, hobby projects, and research progress. I am using this website as a repository of my learning process and an open-source platform to share the details of my projects.